The Triton XTF format converter contains options for converting both bathymetry and side scan. In previous versions of the XTF converter, a reference timestamp was used, and offset with millisecond "counters" stored with each record.
As of HIPS 10.3, the option has been updated to use the previous method or to use Ping Time fields.
Interface
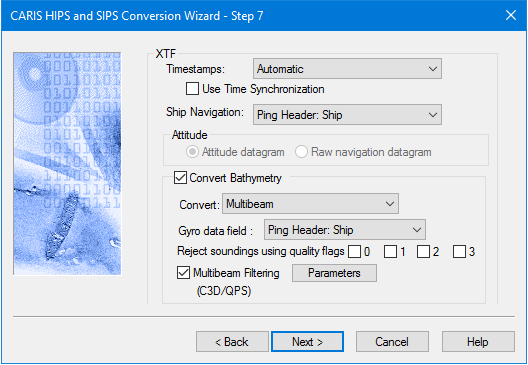
The Triton XTF converter uses this dialog box:
Option | Description |
Timestamps | 1. Select either Automatic or Ping Time: Automatic - (default setting) Millisecond time fields on the bathymetry and side scan packets are used to determine the time for each packet when the records do not contain precise timestamps. For bathymetry and attitude records, if the record contains a high precision timestamp, it is used for all data in that record (bathymetry, navigation, attitude). Ping Time - uses the timestamp stored with the record that has a resolution of 0.01 seconds. • For bathymetry records, if the bathymetry data contains high precision time, high precision time will be used for bathymetry data always. • Ping time is only applied to other data in the same packet (navigation, attitude), as well as to bathymetry data if it does not have high precision time. For attitude packets, ping time overrides any high precision timestamps in the packet. |
Use Time Synchronization | Each XTF file needs to be referenced to a real world timestamp. If this option is set to ON, a check is made to see if all the files can be referenced to the same timestamp, instead of a different timestamp for each file. XTF files with a different timestamp will be ignored. 1. Enable the check box to reference all files to the same timestamp. This option is turned off by default, which means each file will determine its own reference time. |
Ship Navigation | 1. Select the source of navigation data from the drop-down list. If you select Raw Navigation Records, the option to set an Attitude data source is activated. |
Attitude | Select either Attitude diagram or Raw Navigation datagram. |
Convert Bathymetry | 1. Click the Convert Bathymetry check box. |
Convert: | 1. Select a bathymetric data format from the Convert Bathymetry drop-down list: • Multibeam • Multi-transducer • Single beam from records {Prim=0}, {Prim=1} or {Prim=2} (if there is more than one channel of data, identify which channel contains the primary data.) • Single beam from AUX (1,2,3, or 4). |
Gyro data field: | 1. If the Ship Navigation source is set to Raw Navigation Records, and the Attitude source is set Attitude Datagram, select either Attitude Packets or CMG from Navigation (Course Made Good from Navigation) from the drop-down list. 2. If the Ship Navigation source is Raw Navigation Records, and the Attitude source is Raw navigation datagram, select either Raw Navigation Records or CMG from Navigation from the drop-down list. When any of the other Ship Navigation source options are selected, these Gyro sources options are available: • Ping Header: Ship • Ping Header: Sensor • Attitude Packets • CMG from Navigation • CMG from SSS Navigation • Header Gyro Records |
Reject soundings using quality flags | The XTF format attaches quality flags to soundings. For example, 0 represents the lowest quality and 3 represents the highest. Soundings rejected with a quality flag are flagged as Rejected by Disabled Beam in HIPS. 1. Select a quality flag so the soundings with that specific flag value are rejected when converted to HIPS format. |
Multibeam filtering (C3D/QPS) | 1. If you are converting C3D or QPS data, select the Multibeam Filtering check box and click Parameters to select filtering options. |
Procedure
1. Set options.
2. Click Next to set Side Scan options.