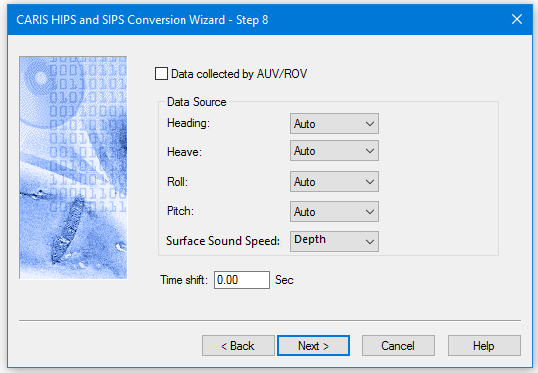
Motion data (heading, heave, roll, and pitch) is automatically read from the active motion reference unit. However, you can select another motion reference unit to read the data. Gyro data can also be read from the headings datagram.
| Option | Description |
Data collected by AUV/ROV | Select the Data collected by AUV/ROV check box to enable proper processing of sub-sea depth during post-processing functions, such as Sound Velocity Correction and Merge. | |
Data Source | Data is read from various sources. 1. Select the | |
Heading | 1. Select the device from the drop-down list. • AUTO (default value) • MRU1 • MRU2 • EM_Height diagram | |
Heave | 1. Select the device number from the drop-down list. • AUTO (default value) • MRU1 • MRU2 | |
Roll | 1. Select the device number from the drop-down list. • AUTO (default value) • MRU1 • MRU2 | |
Pitch | 1. Select the device number from the drop-down list. • AUTO (default value) • MRU1 • MRU2 | |
Surface Sound Speed | 1. Select the datagram from which to read the surface sound speed: • Depth • Surface sound speed • Raw Range | |
Time Shift | 1. Set a number specifying the seconds to add to each datagram time. | |
Procedure
1. Select the Data collected by AUV/ROV check box.
2. Set Data Sources information.
3. Set Time Shit options.
4. Click Next to continue.