Menu | Tools > Coverages > Grid > Variable Resolution Surface |
Tool |
|
Menu | Tools > Coverages > Grid > Variable Resolution Surface |
Tool |
|
Source data can often have widely varying point densities over a given area due to depth changes, survey coverage, etc. When using fixed-resolution grids, it can be difficult to choose a single sampling resolution for the resulting raster model that maintains continuity over sparse areas, while preserving details where there is more data.
Variable resolution (VR) surfaces are coverages in which the resolution can vary in different regions, while maintaining continuity across the entire surface. The desired resolution in discrete areas is determined using selected algorithms, instead of by setting a fixed resolution based on subjective choice.
VR surfaces can be created from one or more track lines, raster surfaces and/or point clouds. The first step to create a VR surface is to determine how to subdivide the region, and what the resolution of each sub-region (or tile) should be. One option is to select a parameter to define the required resolution in each tile. An alternative is to analyze the source data on several criteria to determine the optimum resolution for each. If multiple sources are being used, the application will treat the sources as a single data source, and estimate based on its characteristics.
If there is overlapping data in the sources, all points/nodes are processed, regardless of whether or not they have different values. |
The process starts by dividing data into regular tiles, in this case using a quad-tree-structure, recursively dividing binary space partitions until each tile contains the appropriate number of data samples.
Once the data area is subdivided, a resolution for each tile must be determined using a resolution estimation method. The resulting quad-tree and computed resolution for each region are stored as the Resolution Map for the dataset. From this point, each tile is populated from the source data using standard gridding methods, such as: inverse distance weighted (IDW) mean, uncertainty-based mean, simple mean or selecting the minimum or maximum value.
There are three resolution estimation methods available:
• CARIS Density: Using this method, resolution values are estimated based on source point density. This method provides an adaptive, binning-based algorithm to run on arbitrary point sets containing multibeam or single beam data. It calculates tile sizes based on density rather than using a fixed size and avoids point clusters with a greater density in individual tiles, ensuring accurate overall resolution estimates. This method is useful when working with source data that contains point clusters and has large variations in depth ranges.
• Calder-Rice Density: Using this method, resolution values are estimated based on point density over an area (an assumed tile size). This method is designed and optimized for processing raw multibeam survey data. It is useful when working with data that contains smaller variations in depth ranges. This method tends to have faster processing times because it makes use of more predefined settings.
• Ranges: Using this method, resolution values are assigned based on a tile statistic (such as min., max., mean) and a lookup table of resolutions and values. The lookup table is in the format of a text file and contains a list of range values and the resolution to assign to each range. There are three range estimation methods available for defining the range value to assign to a tile:
• Mean: assigns a resolution based on the average of all depths in a tile.
• Mode: assigns a resolution based on the range that is most frequently found in a tile.
• Percentile: assigns a resolution based on the user-specified Range Percentile value and the point values in each tile, which are sorted deepest to shoalest. If the Range Percentile is set to 0, a resolution will be assigned based on the deepest point in the tile; if it is set to 100, a resolution will be assigned based on the shoalest point. For attributes other than elevation, such as uncertainty, 0 represents the highest value and 100 represents the lowest value.
A sample range/resolution file, Depth_ranges.txt, can be found in the ProgramData directory and is pictured below.
C:\ProgramData\CARIS\<application>\<version>\System
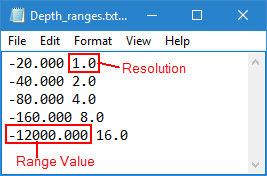
Using the sample file, tiles with a depth of 0 to 20 will be assigned the resolution of 1.0, tiles with a depth of 20.001 to 40 will be assigned a resolution of 2.0, and so on. This file can be copied and/or opened and edited in any text editor to create new files. This method is useful if you know what resolution you want at each depth.
The range values must be in decreasing order. The convention for these files is that elevations are entered in the positive-up z-axis convention, and all values are entered as a number of metres.
Once a VR has been created, the Surface properties in the Properties window can be used to adjust the display of the data. The Rendering and Level of Detail properties are particularly useful for VR surfaces.
• The Rendering property allows you to select the type of interpolation to use for rendering the surface. This affects both the processing time for creating the surface and the way colours are blended in the display. The options available are: Uniform, Bilinear and Triangulation. Uniform and Bilinear methods result in much quicker rendering than the Triangulation method. For VR surfaces, Bilinear is used by default.
• The Level of Detail property allows you to adjust the level of detail used to display the surface. Increasing this setting causes twice the amount of data to be rendered for each level, providing a finer display each time. Decreasing this value causes half the amount of data to be rendered, providing a coarser display. The default value is "Normal". Note that increasing the level of detail will also increase the time it takes for the coverage to be drawn in the view.
See Properties for more information on display settings.
Related commands:
• Export Variable Resolution to BAG
• Import Variable Resolution from BAG
Interface
Parameters for creating a VR surface are set in the New Variable Resolution Surface dialog box.
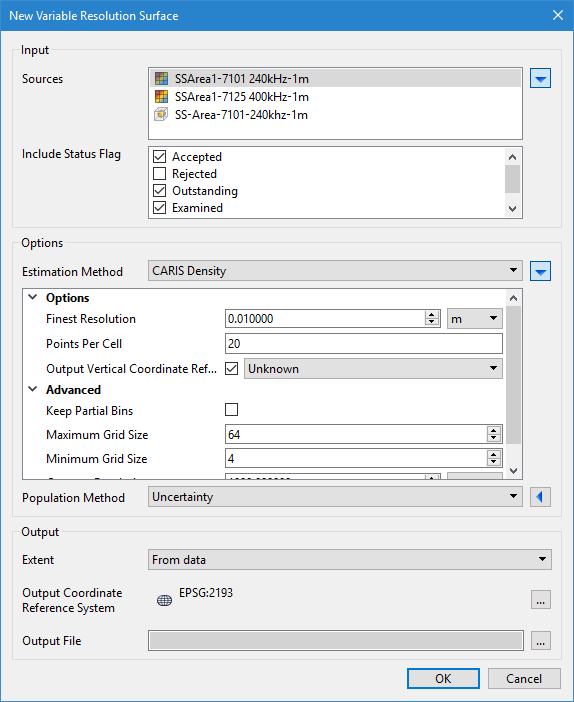
Each section of the dialog box can be collapsed or expanded using the blue arrow buttons at the right of the fields. By default, all sections are collapsed when the dialog box is launched, showing only the fields for each section that require user interaction, all other fields contain default values.
Option | Description |
Input | Set the input data for the new surface. |
Sources | The input data for the process. A combination of elevation bands from point clouds and/or raster surfaces can be selected as input sources. The Sources list displays all supported bands currently open in the application. If a band was selected before launching the dialog box, that band is selected by default. 1. Select each data source to include in the VR surface. • To select a range of sources, press and hold the <Shift> key then click the first and last source in the range. • To select multiple individual sources, press and hold the <Ctrl> key then click each of the relevant sources. Each source can only be selected once. For example, if track line layers are selected and the same track line exists in more than one layer, only one instance of that track line will be included. |
Include Status Flag | Include status flags from the source data in the resulting VR surface. All selected flags present in the source data will be present in the output. 1. Click the check box of each desired status flag. |
Options | Select estimation and population methods for creating the surface and set related options. |
Estimation Method | Select a method and define the necessary options. Different options are available based on the selected estimation method. The estimation methods available are: • Density (Calder-Rice) to estimate resolution based on point density over coverage • Density (CARIS) to estimate resolution based on source point density • Ranges to assign a resolution based on a tile statistic |
Population method | Select a gridding method with which to populate the new surface and define the necessary options. Different options are available based on the selected population method. The population methods available are: • Inverse distance weighting: depth is given by the mean of all samples in the specified neighbourhood, weighted by a function of the inverse of the euclidean distance from the sample to the node. • CUBE: several hypotheses will be calculated based on depth and uncertainty, and the strongest hypothesis returned • Uncertainty: depth is given by the mean of all samples in the resolution bin, weighted by a function of distance and sample uncertainty. • Mean: Use a depth range containing the average value of all points within the tile. • Swath Angle: value set using beam angle and footprint radius that defines the maximum area to which a points will be applied • Selected Value - a single value for the node is used to populate each cell based on the selection criteria set in the options |
Output | Define the size of and projection for the surface, and location of the output file. |
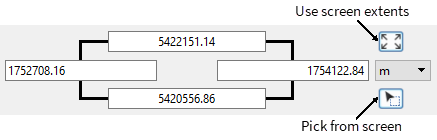
Extent | The extent of the resulting surface. Only source data within these extents will be included in the output surface. The From data option is selected by default. This option computes an extent that covers all selected input coverages. The Custom option provides three different methods for defining the extent of the data to be included. When this option is selected, the dialog box will change to provide the following controls: • Coordinates fields: Manually type the desired coordinates into the fields and select the unit of measure to define the extents of the surface. • Use screen extents button: Click this button to create a surface from the current extents of the view. • Pick from screen button: Click this button to define a section of the displayed data. This changes the shape of the cursor. Use the cursor to drag a box around an area. The Upper and Lower X and Y coordinates for the area will be updated based on the selected command. |
Output Coordinate Reference System | The coordinate reference system of the resulting surface. 1. Click the browse button (...) to open the Select Coordinate Reference System dialog box and set the output system. See Change Coordinate Reference System for information on this tool. |
Output File | The name and location of the output surface file. |
Procedure
1. Select the New Variable Resolution Surface command.
The New Variable Resolution Surface dialog box is displayed.
2. Select the relevant Sources to include in the VR surface.
3. Select the status flags to include in the output.
4. Select a resolution Estimation Method and set its related options.
5. Select a Population Method to populate the surface and set its related options.
6. Set the extent for the surface.
7. Select the Output Coordinate Reference System for the surface.
8. Define a name and location for the output file.
9. Click OK.
A new VR surface is created in the specified location.