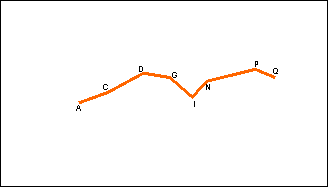
The Opheim algorithm is affected by both the density of original points and the line complexity.
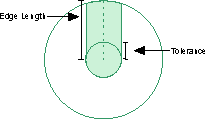
The Opheim algorithm has the following options, which together form the search area:
• Tolerance: This is the minimum tolerance. It forms the radius of a small circle.
• Edge length: This is the maximum tolerance. It forms the radius of a larger circle.
The search area is a strip as long as the edge length and as wide as the circle defined by the minimum tolerance.
In this image, the search area is the green zone.
All points inside the circle defined by the Tolerance option are removed.
All points inside the area defined by the edge length and the width of the tolerance circle are removed except the last point, which is used as the centre of the next iteration.
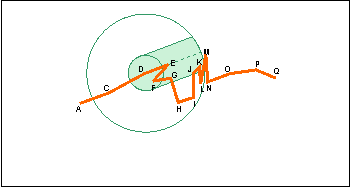
In this example, the minimum tolerance circle is centred on the first point (A) and the search area is rotated so that it runs parallel to the first line segment (AB).
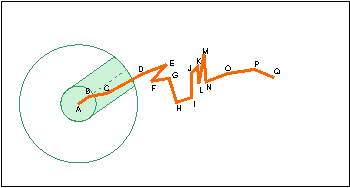
Point B is inside the minimum tolerance and is removed. Point C is between the minimum and maximum tolerance, but since it is the only point there, it cannot be removed.
The circle is centred on point C and the search area is rotated to be parallel to line segment CD.
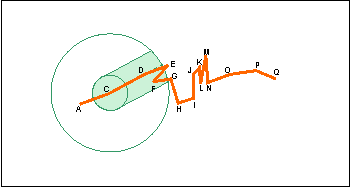
Point D and point F are inside the search area, but point E is not. No points can be removed.
The circle is centred on point D and rotated to be parallel to line segment DE.
Point F is inside the minimum tolerance and is removed. Points E, G, J, and K are inside the search area, but points H and I are not, therefore only point E can be removed.
The circle is moved to centre on point G and is rotated to be parallel to line segment GH.
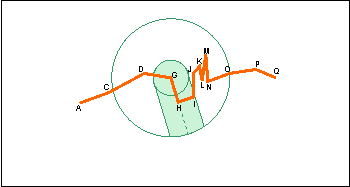
Points H and I are inside the search area. Point H is removed.
The circle is moved to centre on point I and rotated to be parallel to line segments IJ.
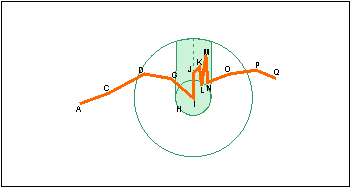
Points J, K, L, M, and N are inside the search area. Points J, K, L, and M are removed.
The circle is moved to centre on point N and the search area is rotated to be parallel to line segments NO.
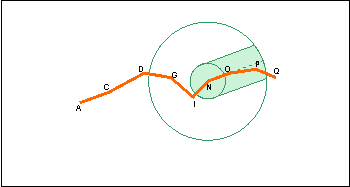
Points O and P are inside the search area. Point O is removed.
The circle is moved to centre on point P and the search area is rotated to be parallel to line segment PQ.
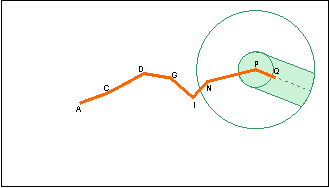
Only point Q is inside the search area, and since it is the last point in the line, it cannot be removed.
The filtered line looks like this: